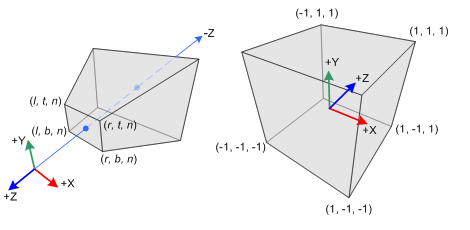

The canonical view volume is a cube with its extreme points at
Some points expressed in view space won’t be part of the view volume and will be discarded after the transformation, this process is called clipping (we only need to check if any coordinate of a point is outside the range
Later it’ll be seen that both transformations imply division and a neat trick is the use of projective geometry to avoid division, any point that has the form
Orthographic projection
An orthographic projection matrix is built with 6 parameters
- left, right: planes in the
- bottom, top: planes in the
- near, far: planes in the
These parameters bound the view volume which is an axis-aligned bounding box

Ortographic Projection
Since the mapping of the range
Finally
We can adapt
The
The
The transformation matrix from view space to clip space is
Finally note that
Building the matrix using combined transformations
A simpler way to think about this orthographic projection transformation is by splitting it in three steps
- translation of the bottom left near corner to the origin i.e.
- scale it to be a 2-unit length cube
- translation of the bottom left corner from the origin i.e.
Perspective projection
Projective geometry concepts are used in this type of projection, particularly the fact that objects away from the point of view appear smaller after projection, this type of projection mimics how we perceive objects in reality
A perspective projection matrix is built with 6 parameters, left, right, bottom, top, near, far
- left, right:
- bottom, top:
- near, far: planes in the
These parameters define a truncated pyramid also called a frustum

Perspective projection
General perspective projection matrix
The mapping of the range
- Project all the points to the near plane, this way all the
- Map all the values in the range

Top view of the frustum

Side view of the frustum
Let
Note that both quantities are inversely proportional to
The point in homogeneous coordinates is
OpenGL will then project any 4D homogeneous coordinate to the 3D hyperplane
We can take advantage of this process and use
Where
Next
Next we substitute the values of
Note that the second fraction is manipulated so that it’s also divisible by
Similarly the value of
Then the transformation matrix seen in
Next we need to find the value of
Since
Then
Since
Note that the value is not linear but it needs to be mapped to
Subtracting the second equation from the first
Solving for
Substituting the values of
Symmetric perspective projection matrix
If the viewing volume is symmetric i.e.
Then
Symmetric perspective projection matrix from field of view/aspect
gluPerspective receives instead of the
- field of view (
- aspect (

fov
We see that the value of
We can find the value of
Substituting