A first person camera captures objects from the viewpoint of a player’s character, the camera has the following characteristics:
- orbit: the character can look to the left, right, up & down, however if we imagine the head of the character it can’t be tilted
- translation: the character can move in 4 directions, forward backward, to the left and to the right, note that the vector that represents the direction the character is looking at doesn’t change (the orbit is not affected by translation)
- our camera will always move in the same direction the camera is looking at, this is usually done differently on first person shooters where the character may move in a different direction than the direction the camera is looking at
Both characteristics can be implemented by creating a space for the camera and defining the direction in this space, that way translation doesn’t modify the direction the camera is looking at and for orbit we would rotate the basis vectors of the space
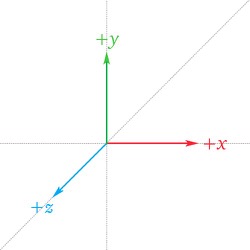
Assuming that the world space axes are as follows
Let
- the character looks to the left or right - rotation relative to the upright space
- the character looks up or down - rotation relative to the upright space
Note that the sequence of
intrinsic rotations
The angles
- let
- if the character looks up then
- if the character looks to the right then
Mouse coordinates delta to extrinsic rotations delta
Next we need to define what happens when we move the mouse, we can configure a window manager like
GLFW
to call a callback method whenever we move the mouse with the coordinates of the mouse as an argument (e.g. as
Note that
The next step is to update the values of
Note that the we also need to value of
Finally to compute the value of
#pragma once
class FPS_Mouse {
public:
float sensitivity;
float yaw
float pitch;
glm::vec4 target;
static const glm::vec3 YAW_AXIS = glm::vec3(0.0f, 1.0f, 0.0f);
static const glm::vec3 PITCH_AXIS = glm::vec3(1.0f, 0.0f, 0.0f);
FPS_Mouse(float yaw, float pitch);
void process_mouse_movement(double delta_x, double delta_y, bool constraint_pitch);
glm::mat4 get_view_matrix() const;
private:
static const glm::vec4 P = glm::vec3(0.0f, 0.0f, -1.0f, 1.0f);
void update_target();
}
FPS_Mouse::FPS_Mouse(float yaw = 0, float pitch = 0) :
sensitivity(0.05f) {
this->yaw = yaw;
this->pitch = pitch;
this->update_target();
}
void FPS_Mouse::process_mouse_movement(double delta_x, double delta_y, bool constraint_pitch = true) {
yaw -= delta_x * sensitivity;
pitch += delta_y * sensitivity;
if (constraint_pitch) {
if (pitch > 89.0f) { pitch = 89.0f; }
if (pitch < -89.0f) { pitch = -89.0f; }
}
this->update_target();
}
void FPS_Mouse::update_target() {
/* Y = glm::rotate(glm::mat4(1.0f), glm::radians(yaw), FPS::YAW_AXIS); */
/* X = glm::rotate(glm::mat4(1.0f), glm::radians(pitch), FPS::PITCH_AXIS); */
/* target = Y * X * p; */
float yaw_radians = glm::radians(yaw);
float pitch_radians = glm::radians(pitch);
target.x = -sin(yaw_radians) * cos(pitch_radians);
target.y = sin(pitch_radians);
target.z = -cos(yaw_radians) * cos(pitch_radians);
}